저번 챔버 설계에 이어서 다음 내용을 쓸 수 있게 되었다. 종강을 하고 2주간 거의 학교에서 살다시피 하며 이것저것 했다. 먼저 챔버를 만들기 앞서 내 프린터에 나의 펌웨어를 올리고 싶었다. 그래서 본격적으로 기존의 순정 펌웨어를 내리고 Klipper라는 커스텀 펌웨어를 올리는 과정을 여기에 적어보겠다.
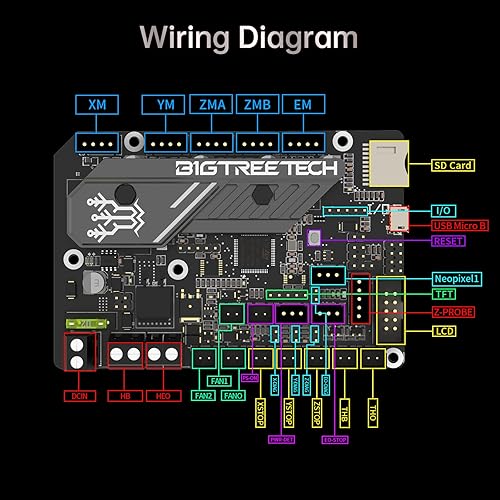
기존의 Marlin 기반 Einsy Rambo 순정 보드를 제거하고, Klipper 기반의 Bigtreetech SKR Mini V3.0 보드로 교체했다. 알리익스프레스에서 구매해서 기존의 순정보드보다 더욱 자유롭게 튜닝할수 있다고 한다.


기존 펌웨어보다 확장성이 좋고 추후 MMU라는 멀티컬러 튜닝을 할때도 필요하다고 한다고 해서 난생 처음으로 프린터 펌웨어를 접하게 되었다. 속도 튜닝이나 가속도 튜닝같은 세부 설정을 자유롭게 다룰수 있으며 장점들이 많다. 그치만 사실 제일 맘에 들었던건 간지 나는 웹UI를 사용할수 있어서 였다. 챔버에 커스텀한 웹 UI를 띄우면 멋있어 보일것 같아서도 큰 이유이다.
글을 그냥 이렇게 쓰지만 뭣도 모르고 막무가내로 시작해서 정말 오래걸리고 시행착오도 많았다.
보드를 교체한다는 것은 (생각보다 좀 많이 많이) 프린터를 여러 번 분해하고 다시 조립해야 한다는 뜻이고, 자연스럽게 3D 프린터 구조에 대한 이해도 많이 늘었다고 생각한다. 챔버에 넣기 전에, 최소한 내가 의도한 대로 움직이는 프린터를 만들어 두고 싶었던 것도 큰 이유였다.
여담으로 프루사에서 하리보는 매우 중요한데.. 프루사 키트를 처음 조립할때 상자 안에 하리보 한 봉지가 들어 있고 설명서를 보면,
이 하리보는 조립자의 동기부여를 위해 매우 중요한 요소라고 한다.
단계별로 지금 하리보 몇 개 먹어야 하는지 안내가되어 있을 정도다.
(하리보 봉지를 뜯을때 주변의 하리보를 노리는 사람들을 절대 조심해야한다)라고 써있음
물론 나는 중고로 사서 하리보는 없었지만..

본격적인 작업은 Prusa MK3S를 완전히 분해하는 것부터 시작했다. 기존 순정 보드에서 모든 커넥터를 분리했는데, 새로 교체할 SKR 보드와 커넥터 규격이 전부 달랐다. 결국 모든 배선을 JST 커넥터로 다시 선을 찝어줬고, 각 모터와 센서별로 라벨링을 해두었다.
또 신경 써야 하는 부분은 모터 드라이버 핀 배열이다. MK3S 순정 보드와 SKR 보드는 핀 배열이 달라서 단순히 꽂는다고 끝이 아니었다...
회로도를 하나씩 보면서 바뀐 위치에 맞게 배선 순서를 다시 맞춰주는 작업을 진행했다.
선을 모두 교체하고 라벨링을 끝낸뒤 소프트웨어 세팅으로 넘어갔다. 라즈베리파이에 리눅스를 설치하고, KIAUH라는 설치 툴을 사용해 Klipper를 올렸다. 이후 웹 UI로 사용할 Fluidd도 함께 설치했다. 보드 설정값을 반영해 펌웨어를 빌드한 뒤, 이를 Micro SD 카드에 담아 SKR 보드에 프로그래밍했다.
전원은 PSU를 이용해 SKR 보드에 직접 공급했고, 라즈베리파이와 SKR 보드는 USB 케이블로 연결했다.
연결을 끝내고 브라우저에서 웹 페이지 대시보드로 접속하면 Fluidd 화면이 보인다!!
내 환경에서는 로컬 IP가 192.168.0.121이었다.(전부 다름)
다음으로 개발실 어딘가에 굴러다니던 오래된 모니터를 하나 주워와 분해를 해서 Fluidd를 띄워 보았다. Chromium을 부팅 시 자동 실행되도록 설정해서 전원을 켜면 바로 Fluidd 화면이 나타나게 해보았다. 오래된 티가 팍팍 나지만 그래도 쓸만 한거(?) 같긴 하다..
챔버에 달았을때 간지가 나려면 모니터가 좋아야 하는데 말이다 ㅎ
이제 정말 기본적인 세팅만 끝났고 지옥의 캘리브레이션과 세팅이 남았다.
다음 편에서 부터 이어서 써보도록 하겠다 !
'Embedded System' 카테고리의 다른 글
| 자작 3D 프린터 챔버 Project - 3 (0) | 2025.12.28 |
|---|---|
| 자작 3D 프린터 챔버 Project - 1 (0) | 2025.11.26 |
| ROS Noetic과 CAN 통신으로 DJI RS4 짐벌 제어하기 (4) | 2025.07.24 |
| TM4C123GH6PM으로 LED 제어하기! (0) | 2024.11.20 |


